
Nature正刊!ETH开发随声音运动的新型人造肌肉,为多个领域的发展提供新机会
今年全球机器人领域专家学者研汇聚中国杭州,举办国际智能机器人与系统会议即IROS 2025。作为机器人领域规模最大、影响最广的国际会议之一,IROS一如既往地成为前沿技术展示与国际学术产业交流的重要平台。在本次会议上,“软体机器人”“可变形机器人”“智能致动器”等关键词频频出现,彰显机器人发展正逐步由传统刚体结构向柔性、仿生、智能化方向转型。
软体机器人通过弹性体、可变构型、柔性驱动器等实现优越的柔顺性、结构适应性和安全的人机协作。“人工肌肉”作为软体机器人中关键的运动与控制模块,其发展情况尤为值得关注。近年来,研究者不仅在气动/液压式软人工肌肉上取得进展,也在电致驱动、介电弹体、光驱动、磁驱动和离子聚合物-金属复合物等高性能人工肌肉材料上不断突破。然而,从实验室走向实际系统部署,人工肌肉仍面临材料耐久、集成化、响应速度、可编程控制、可扩展性和系统化设计等挑战。
与此同时,中国正在迈入新一轮科技创新和产业升级的重要时期。在即将实施的“十五五”规划中,预期中国将加快发展人工智能、机器人、信息通信等新兴产业,并强调基础研究、自主技术、产业化应用提升。作为装备制造业、智能机器人产业的重要组成,机器人关键驱动组件及智能系统也被纳入国家战略视野。在这种政策背景下,新型驱动器、智能致动器、可编程人工肌肉等技术模块的重要性日益凸显:它们不仅是科技创新链、产业链中的“短板”之一,更可能成为引领机器人产业跃升的新支点。
近日,苏黎世联邦理工学院的Daniel Ahmed教授团队开发了一种含有微泡且可通过超声波控制的新型人工肌肉。为软体机器人、可穿戴技术、触觉技术和生物医学等领域的发展提供新机会。

这项研究由施展博士和张志远博士担任共同一作,已发表于《Nature》正刊。
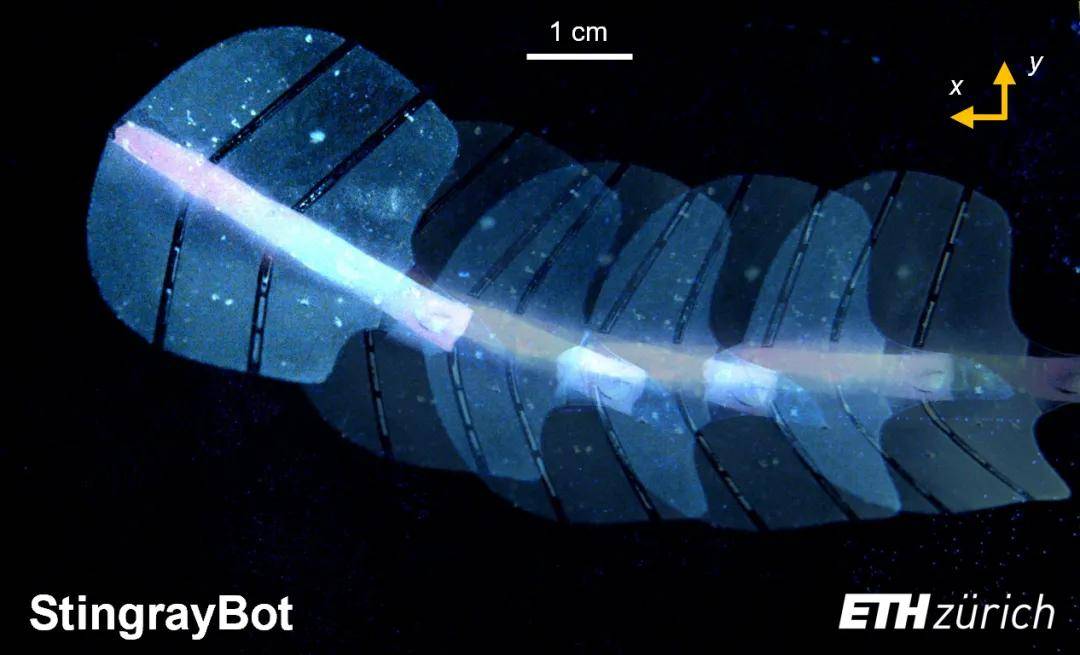
一种由微泡阵列人工肌肉制成的仿生机器人,Stingraybot,通过超声波引导模仿黄貂鱼波动。(图片:施展等人/苏黎世联邦理工学院)
为什么基于超声波的人工肌肉一直未能开发?与水相比,软质材料通常具有较低的声学对比度,导致其在超声波激活时无法产生足够的力来发挥有效功能。由于缺乏对声音与复杂软质材料之间相互作用的理解,这一困境更加严重,阻碍了高效声驱动肌肉系统的研发。我们发现,将超声波激活的微泡阵列集成到软质人工肌肉中,提供了一种巧妙的方法,有望突破这些限制。
研究人员使用采用高分辨率模具注塑法制造了这些人工肌肉。首先,使用软光刻技术在硅片上图案化微柱阵列,作为圆柱形微腔的阴模。然后将一层薄薄的聚二甲基硅氧烷旋涂到硅片上,获得厚度均匀的薄膜。固化后,再将人工肌肉脱模和切片。
每个微腔的深度和直径约为10-100微米——大约相当于人类头发的宽度。当肌肉浸入水中时,数以万计的微气泡会同时被捕获在这些微腔内。
超声波的传播会引发微气泡的振荡,振动的气泡产生微射流,对肌肉底面施加均匀的反作用力,使其变形。由于不同尺寸的微泡表现出不同的共振频率,它们可以被独立激活,从而产生局部的反作用力。因此,通过不同尺寸微泡的排列以及使用扫频超声调制进行频率选择性激发,研究人员解锁了控制人工肌肉多模态变形的能力。
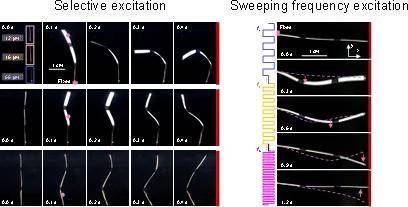
大小不同的气泡阵列可以被选择性超声激活,也可以被扫频超声激活从而产生波动运动。(图片:施展等人/苏黎世联邦理工学院)
可编程微泡阵列人工肌肉的开发为无线驱动提供了一种激动人心的替代方案,使软体机器人领域的创新设计成为可能。捕获和操纵小型脆弱的模型动物(例如斑马鱼胚胎)可能成为软体机器人领域一个颇具吸引力的研究方向。传统的微型镊子通常缺乏足够的抓取力,而体积较大的抓取器又有可能损坏脆弱的目标。为了解决这个问题,研究人员设计了一种微型软体抓取器,它由六到十个大小均匀的微泡阵列人工肌肉组成。每个触手浸入水中时可容纳约10,000-20,000个微泡。在受到超声刺激后,触手在100毫秒内抓住了一只斑马鱼幼鱼。当超声刺激停止后,幼鱼很容易地游走了。
“这个小型化的抓手能够如此轻柔地运作,而且反复刺激未发现幼鱼发热或出现不良反应,证实了该机制的生物相容性。”Ahmed的前博士生、该研究的共同第一作者张志远博士回忆道。
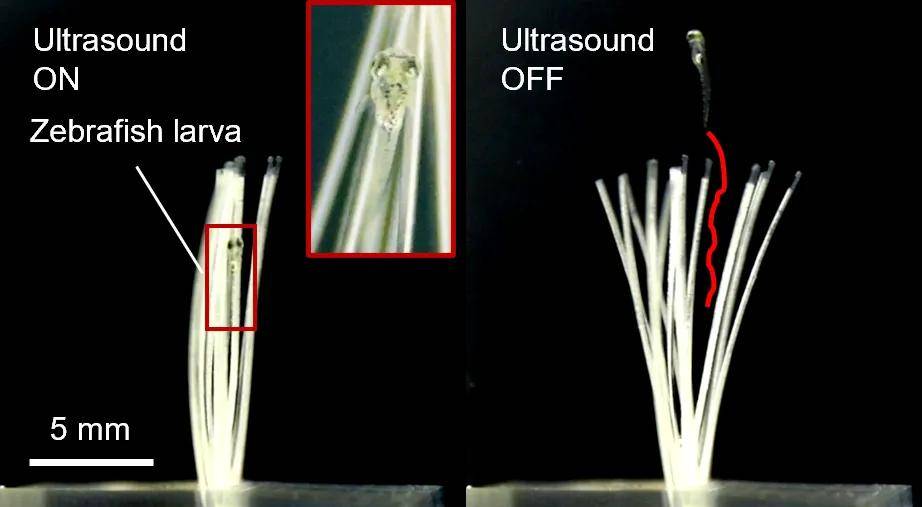
微泡阵列人工肌肉组成的小型软体抓取器抓取活体斑马鱼幼鱼,每个触手浸入水中时可容纳约10,000-20,000个微泡。(图片:施展等人/苏黎世联邦理工学院)
研究人员进一步证明了该人工肌肉可以作为一种适形机器人皮肤,能够粘附于任意表面并赋予静止物体运动。例如,将包含微泡阵列机器人皮肤附着于任意形状的杏仁或者茶叶上,这些物体在超声波激励下表现出可控的旋转或者弯曲。微泡阵列机器人皮肤赋予了无生命物体多种运动能力,且尺寸或质量不会显著增加。
利用人工肌肉的动态变形和快速响应能力,研究人员还设计了一款仿生超声波驱动的无线黄貂鱼机器人,Stingraybot。这款仿生黄貂鱼机器人的两侧集成了两块人造肌肉,旨在模仿天然黄貂鱼的胸鳍。这些胸鳍包含不同大小的微气泡阵列,当受到扫频超声刺激时,Stingraybot的鳍会呈现类似于黄貂鱼自然运动的波动性运动。
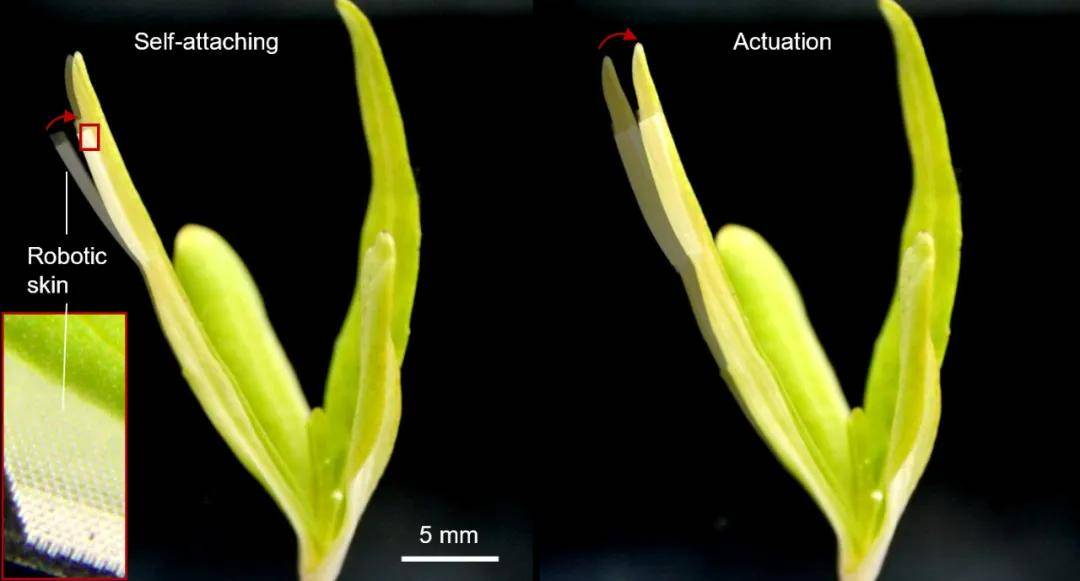
人工肌肉可以作为一种适形机器人皮肤,能够粘附于任意表面并赋予静止物体运动。(图片:施展等人/苏黎世联邦理工学院)
“波动运动对我们来说是一大亮点,”艾哈迈德教授说道,“这表明我们不仅可以利用微气泡实现简单的运动,还可以像在生物体内一样实现复杂的运动模式。”
超声驱动的可编程人工肌肉在未来的医疗和技术应用中拥有巨大的潜力。通过将生物相容性、灵活性和无线控制相结合,它们代表了一种极具前景的医疗应用工具。
为了评估无线机器人药物输送和原位部署的潜力,研究人员展示了机器人皮肤与离体猪心脏心外膜表面的适形附着,并在超声波刺激下保持功能性粘附超过60分钟。通过将不同的微泡阵列设计成圆形几何形状并调整激励频率,实现了多模态形状变换、可编程的局部机械力以及选择性药物输送。
研究人员还演示了超声引导下预折叠的人工肌肉和黄貂鱼机器人在体外猪膀胱内部和猪胃肠组织中的导航。他们首先将一个黄貂鱼机器人预折叠并封装在一个可食用的胶囊中。一旦被释放到胃中,黄貂鱼机器人便会在超声驱动下在密闭的生物医学环境中按需推进。在另一项实验中,研究人员将线性人工肌肉预折叠成圆柱形的轮状结构。在扫频下,该执行器表现出沿着胃肠道复杂黏膜表面的定向滚动推进力。其目标应用场景包括针对特殊疾病的定点药物释放、微创进入炎症或纤维化组织,以及在刚性工具无法触及的区域进行无线驱动。
“肠道是一个特别复杂的环境,因为它狭窄、弯曲且不规则,”Ahmed的前博士生、该研究的共同第一作者施展博士解释说,“因此,这尤其令人印象深刻!”
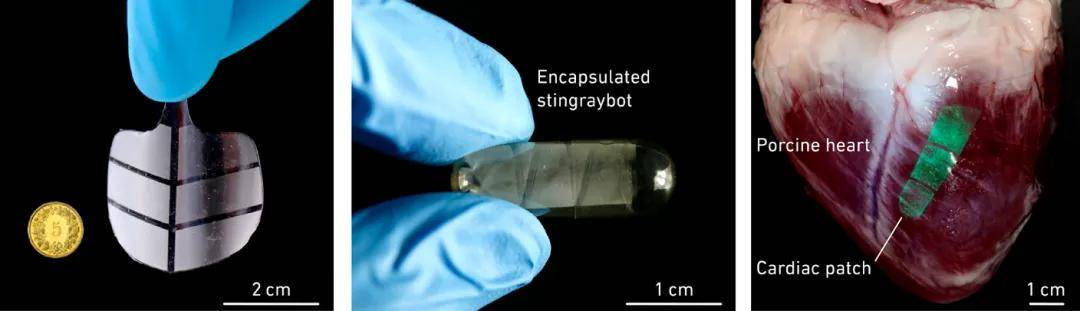
Stingraybot约4厘米宽(左图),可以卷起来放入胶囊中,方便患者将来吞服(中图)。这种新型肌肉还可以作为贴附在心脏上(右图)。(图片:施展等人/苏黎世联邦理工学院)
本次成果首次将超声驱动从微观机器人扩展到介观软体机器人,不仅让超声成功驱动了更大尺寸的材料,还真正用在了动物实验中,体现了其在生物医学应用中的巨大潜力。相比磁控机器人来说,本次成果的另一个好处在于无需另外搭建一套设备来进行驱动,此次成果所使用的超声波技术具有和临床超声技术进行无缝衔接的优势。
文章链接:
https://www.nature.com/articles/s41586-025-09650-3